-

ارتش یازده نفره!
موزیکویدیو جدید نیوزیک؛ تقدیم به سلاطین مستطیل سبز در جام جهانی
-
بچه رو معتاد تحسین نکن!
تا حالا به این فکر کردی شاید «آفرین» گفتنهای زیاد، بچهها رو مضطرب کنه؟ شاید عجیب باشه، اما روانشناسی میگه تشویق بیش از حد، مثل یک تله کمالگرایی برای بچه عمل میکنه.
-
سوالات سمی والدین!
گاهی یک سؤال ساده، میتواند اثری عمیق روی ذهن و احساسات کودک بگذارد. بعضی از سؤالها به جای آموزش و تربیت، ناخواسته اعتمادبهنفس، احساس امنیت و صداقت بچهها را هدف میگیرند. شناخت این الگوهای اشتباه، قدمی مهم برای ساختن رابطهای سالمتر با فرزندان است.
-

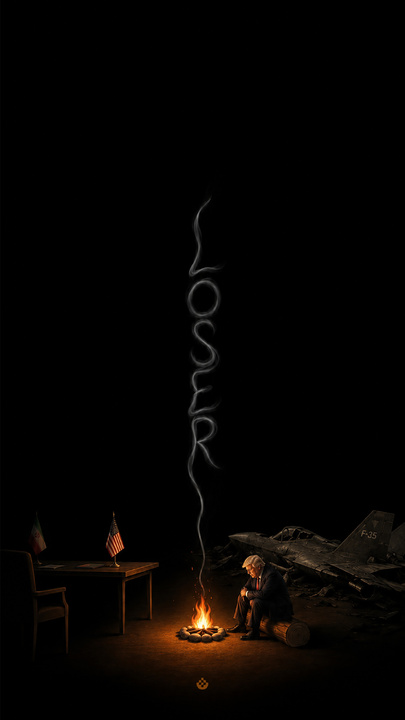
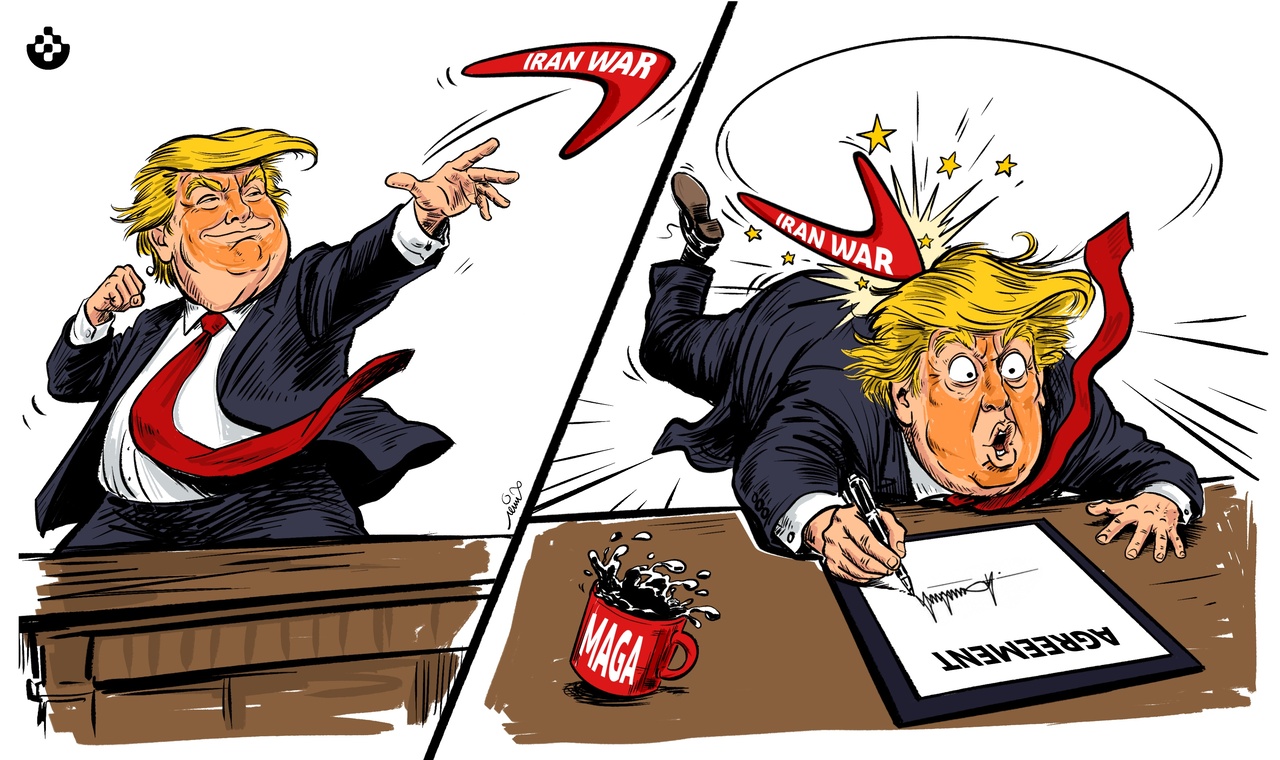
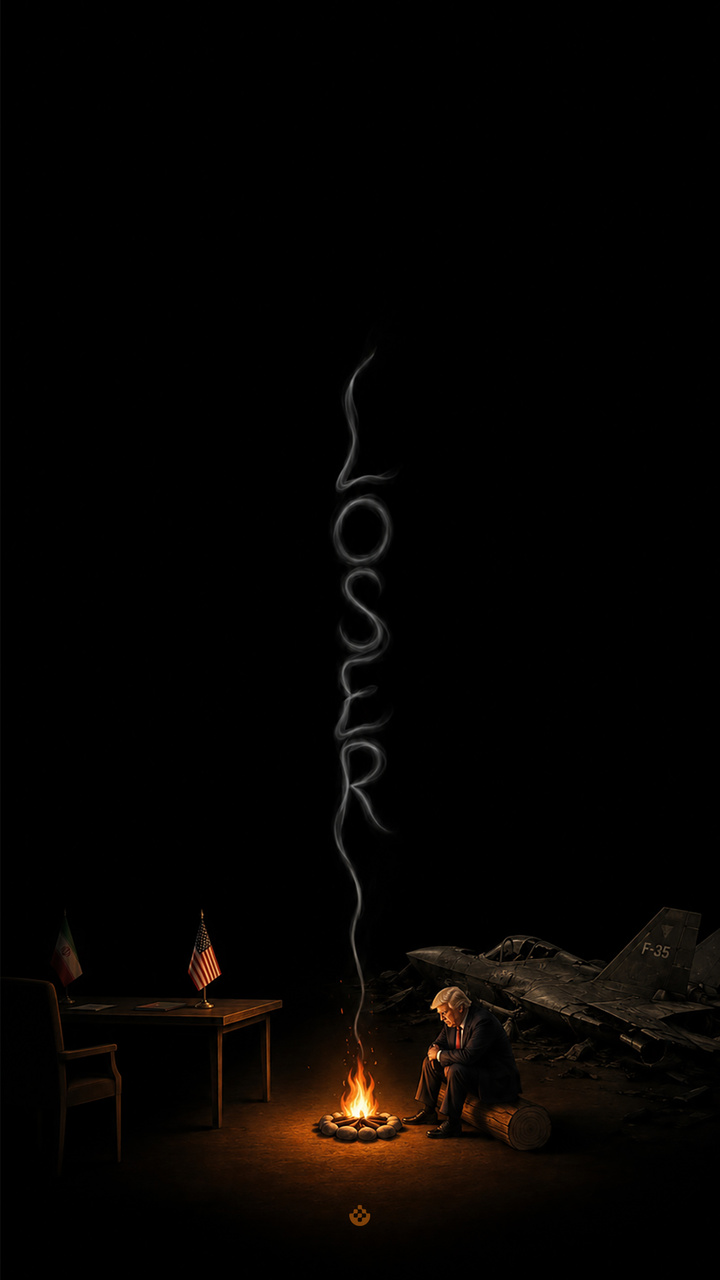
سایه بزرگ ناکامی بر پیروزی ادعایی ترامپ
از آغاز حملهی نظامی آمریکا به ایران، ترامپ ادعاهای زیادی را در شبکههای اجتماعی مطرح کرده است. از تغییر رژیم گرفته تا تسلیم بی قید و شرط ایران.
-
چرا «غر زدن» به سالمندان یک آزار خانگی پنهان است؟
بر اساس گزارش سازمان بهداشت جهانی از هر ۶ سالمند در جهان، یک نفر شکلی از سوءرفتار را تجربه میکند که سوءرفتار کلامی و عاطفی رایجترین نوع آن است.
-
راز ذهنیت خرچنگی!
حقیقت تلخی وجود دارد که احتمالاً هیچکس در روزهای موفقیت به شما نخواهد گفت: «بسیاری از آدمهای اطرافتان شما را دوست دارند، اما نه تا وقتی که از آنها جلو بزنید!»